Từ khoá gợi ý
Hôm nay chúng ta tiếp tục học bài 5: Tổng hợp hai dao động điều hòa cùng phương, cùng tần số. Phương pháp Fre-Nen, đây là bài cuối cùng của chương Dao động điều hòa
Tổng hợp dao động là nói gọn, nói chính xác đó là tổng hợp hai dao động điều hòa cùng phương, cùng tần số. Để hiểu cụ thể và chi tiết hơn, mời các em cùng nghiên cứu nội dung của bài nhé.
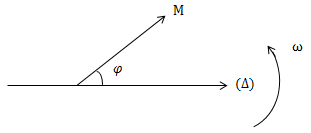
Ta có thể biểu diễn một dao động \(x = A\cos (\omega t + \varphi )\) bằng một vectơ quay \(\overrightarrow{OM}\) tại thời điểm ban đầu có các đặc điểm sau:
Có góc tai góc tọa độ của Ox
Có độ dài bằng biên độ dao động; OM = A.
Hợp với Ox một góc \(\small \varphi\)
Hay: \(\overrightarrow{OM} \left\{\begin{matrix} |\overrightarrow{OM}| = A \ \ \ \ \\ (\overrightarrow{OM},\Delta ) = \varphi \end{matrix}\right.\)
VD: \(x = 5 \cos (2 \pi t + \frac{\pi}{4}) \ (cm)\)
Tìm tổng của hai dao động
\(\left\{\begin{matrix} x_1 = A_1 \cos (\omega t + \varphi _1)\\ x_2 = A_2 \cos (\omega t + \varphi _2) \end{matrix}\right.\)
Ta lần lượt ta vẽ hai vec tơ quay đặt trưng cho hai dao động:
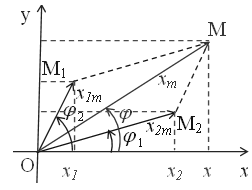
Ta thấy \(\small \underset{OM_1}{\rightarrow}\) và \(\small \underset{OM_2}{\rightarrow}\) quay với tốc độ góc ω thì \(\small \underset{OM}{\rightarrow}\) cũng quay với tốc độ góc là ω.
Phương trình tổng hợp
\(x = A\cos (\omega t + \varphi )\)
\(\small \Rightarrow\) Kết luận: Dao động tổng hợp của hai dao động điều hòa cùng phương, cùng tần số là một dao động điều hòa cùng phương, cùng tần số với hai dao động đó.
Trong đó:
\(A = \sqrt{A_{1}^{2} + A_{2}^{2} + 2A_1A_2\cos (\varphi _2 - \varphi _1)}\) (1)
\(\tan \varphi = \frac{A_1 \sin \varphi _1 + A_2 \sin \varphi _2}{A_1 \cos \varphi _1 + A_2 \cos \varphi _2}\) (2)
Ta có:
\(\ \Delta \varphi = \varphi _2 - \varphi _1 = k2 \pi\): x1, x2 cùng pha \(\Rightarrow \left\{\begin{matrix} A = A_1 + A_2\\ \varphi = \varphi _1 = \varphi _2 \end{matrix}\right.\)
\(\ \Delta \varphi = \varphi _2 - \varphi _1 = (2k + 1) \pi\): x1, x2 ngược pha \(\Rightarrow \left\{\begin{matrix} A = |A_1 - A_2| \ \ \ \ \ \ \ \ \\ \varphi = \varphi _1 \ neu\ A_1 > A_2 \end{matrix}\right.\)
\(\ \Delta \varphi = (2k + 1) \frac{\pi}{2} \Rightarrow x_1 \perp x_2 \Rightarrow A = \sqrt{A_{1}^{2} + A_{2}^{2}}\)
Tổng hợp các dao động sau:
\(\\ a/ \left\{\begin{matrix} x_1 = 2 \cos (2 \pi t - \pi )\\ x_2 = 3 \cos (2 \pi t + \pi ) \end{matrix}\right. \\ b/ \left\{\begin{matrix} x_1 = 5 \cos ( \pi t - \frac{\pi }{3})\\ x_2 = \cos ( \pi t + \frac{2\pi }{3}) \end{matrix}\right. \\ c/ \left\{\begin{matrix} x_1 =6 \cos 4 \pi t \ \ \ \ \ \ \ \\ x_2 = 6 \cos (4 \pi t + \frac{\pi }{3}) \end{matrix}\right. \\ d/ \left\{\begin{matrix} x_1 = 4 \cos (5 \pi t + \frac{\pi }{6}) \ \ \ \ \\ x_2 = 4\sqrt{3} \cos (5 \pi t - \frac{\pi }{3}) \end{matrix}\right.\)
a/ \(\Delta \varphi = \pi - (- \pi) = 2 \pi\): x1, x2 cùng pha
\(\Rightarrow \left\{\begin{matrix} A = A_1 + A_2 = 2 + 3 = 5 \ cm\\ \varphi = \pi ;\ \varphi =- \pi \hspace{2,3cm} \end{matrix}\right.\)
\(\rightarrow x = 5\cos (2 \pi t \pm \pi )\ (cm)\)
b/ \(\Delta \varphi = \frac{2 \pi}{3} - \frac{\pi }{3} = \pi\): x1, x2 ngược pha
\(\Rightarrow \left\{\begin{matrix} A = |A_1 - A_2| = |5-1| = 4 \ cm\\ \varphi = \varphi _1 = -\frac{\pi }{3}\ (Vi\ A_1 > A_2) \ \ \ \ \end{matrix}\right.\)
\(\rightarrow x = 4 \cos (\pi t - \frac{\pi}{3}) \ (cm)\)
c/ \(\left\{\begin{matrix} x_1 = 6 \cos 4 \pi t \ (cm) \ \ \ \ \ \ \ \rightarrow \left\{\begin{matrix} A_1 = 6 \ cm\\ \varphi _1 = 0 \ \ \ \ \end{matrix}\right.\\ x_2 = 6 \cos (4 \pi t + \frac{\pi}{3}) \ (cm) \rightarrow \left\{\begin{matrix} A_2 = 6\ cm\\ \varphi _2 = \frac{\pi }{3} \ \ \ \ \end{matrix}\right. \end{matrix}\right.\)
\(\cdot \ A = \sqrt{6^2 + 6^2 + 2.6.6 \cos \frac{\pi}{3}} = 6\sqrt{3}\ cm\)
\(\cdot \ \tan \varphi = \frac{6.\sin 0 + 6. \sin \frac{\pi }{3}}{6. \cos 0 + 6.\cos \frac{\pi }{3}} = \frac{3\sqrt{3}}{9} = \frac{\sqrt{3}}{3} \Rightarrow \varphi = \frac{\pi }{6}\)
d/ \(\left\{\begin{matrix} x_1 = 4\cos (4\pi t + \frac{\pi}{6})\ (cm)\ \ \ \ \\ x_2 = 4\sqrt{3} \cos (5 \pi t - \frac{\pi }{3})\ (cm) \end{matrix}\right.\)
\(\Delta \varphi = \frac{\pi }{2} - \left ( - \frac{\pi}{3} \right ) = \frac{\pi }{2}\)
\(A = \sqrt{A_{1}^{2} + A_{2}^{2}} = 8 \ (cm)\)
\(\tan \varphi = \frac{4 \sin \frac{\pi}{6} + 4\sqrt{3} \sin -\left ( - \frac{\pi}{3} \right )}{4 \cos \frac{\pi}{6} + 4\sqrt{3} \cos -\left ( - \frac{\pi}{3} \right )} = \frac{-4}{4\sqrt{3}}\)
\(\rightarrow \tan \varphi = -\frac{1}{\sqrt{3}} \Rightarrow \varphi = -\frac{\pi }{6}\)
\(\rightarrow x = 8\cos (5 \pi t - \frac{\pi }{6})\ (cm)\)
Cho 2 dao động cùng phương, cùng tần số có phương trình \(\left\{\begin{matrix} x_1 = A_1 \cos (\omega t + \frac{\pi }{3})\ (cm)\\ x_2 = A_2 \cos (\omega t - \frac{\pi }{2})\ (cm) \end{matrix}\right.\)
Dao động tổng hợp \(x = x_1 + x_2 = 6\sqrt{3}\cos (\omega t + \varphi )\). Tìm giá trị lớn nhất của \(A_2\) khi thay đổi \(A_1\)?
Định lý sin: \(\frac{a}{\sin A} = \frac{b}{\sin B} = \frac{c}{\sin C}\)
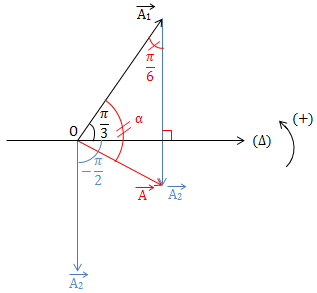
\(x=x_1 + x_2 \Rightarrow \overrightarrow{A} = \overrightarrow{A_1} + \overrightarrow{A_2}\)
Ta có: \(\frac{A_2}{\sin \alpha } = \frac{A}{\sin \frac{\pi }{6}} \Rightarrow A_2 = \frac{A}{\sin \frac{\pi }{6}}. \sin \alpha\)
\(\Rightarrow A_2 = \frac{6\sqrt{3}}{\frac{1}{2}}.\sin \alpha = 12\sqrt{3}.\sin \alpha\)
Qua bài giảng Tổng hợp hai dao động điều hòa và Phương pháp Fre-Nen này, các em cần hoàn thành 1 số mục tiêu mà bài đưa ra như :
Biểu diễn được phương trình dao động điều hòa bằng phương pháp vectơ quay.
Vận dụng được phương pháp giản đồ Fre – nen để tìm phương trình dao động tổng hợp hai dao động điều hòa cùng phương, cùng tần số.
Các em có thể hệ thống lại nội dung kiến thức đã học được thông qua bài kiểm tra Trắc nghiệm Vật lý 12 Bài 5 cực hay có đáp án và lời giải chi tiết.
Cho 2 dao động điều hòa:
\(\begin{array}{l} {x_1} = 5cos\left( {2\pi t + \frac{\pi }{4}} \right)\,\,cm\\ {x_2} = 5cos\left( {2\pi t + \frac{{3\pi }}{4}} \right)\,\,cm \end{array}\)
Tìm dao động tổng hợp.
Một vật tham gia đồng thời 2 dao động:
\(\begin{array}{l} {x_1} = 3cos\left( {5\pi t + \frac{\pi }{3}} \right)\,\,cm\\ {x_2} = 3\sqrt 3 cos\left( {5\pi t + \frac{\pi }{6}} \right)\,\,cm \end{array}\)
Tìm hương trình dao động tổng hợp.
Vật khối lượng 400g tham gia đồng thời 2 dao động điều hòa cùng phương với các phương trình :
\(\begin{array}{l} {x_1} = 3\sin \left( {5\pi t + \frac{\pi }{2}} \right){\mkern 1mu} {\mkern 1mu} cm;\\ {x_2} = 6cos\left( {5\pi t + \frac{\pi }{6}} \right){\mkern 1mu} {\mkern 1mu} cm \end{array}\)
Vận tốc cực đại của vật là:
Câu 4-10: Mời các em đăng nhập xem tiếp nội dung và thi thử Online để củng cố kiến thức về bài học này nhé!
Các em có thể xem thêm phần hướng dẫn Giải bài tập Vật lý 12 Bài 5để giúp các em nắm vững bài học và các phương pháp giải bài tập.
Bài tập 1 trang 25 SGK Vật lý 12
Bài tập 2 trang 25 SGK Vật lý 12
Bài tập 3 trang 25 SGK Vật lý 12
Bài tập 5 trang 25 SGK Vật lý 12
Bài tập 4 trang 25 SGK Vật lý 12
Bài tập 6 trang 25 SGK Vật lý 12
Bài tập 5.1 trang 13 SBT Vật lý 12
Bài tập 5.2 trang 13 SBT Vật lý 12
Bài tập 5.3 trang 14 SBT Vật lý 12
Bài tập 5.4 trang 14 SBT Vật lý 12
Bài tập 5.5 trang 14 SBT Vật lý 12
Bài tập 5.6 trang 14 SBT Vật lý 12
Bài tập 5.7 trang 14 SBT Vật lý 12
Bài tập 5.8 trang 15 SBT Vật lý 12
Bài tập 5.9 trang 15 SBT Vật lý 12
Bài tập 5.10 trang 15 SBT Vật lý 12
Bài tập 1 trang 60 SGK Vật lý 12 nâng cao
Bài tập 2 trang 60 SGK Vật lý 12 nâng cao
Bài tập 3 trang 60 SGK Vật lý 12 nâng cao
Trong quá trình học tập nếu có thắc mắc hay cần trợ giúp gì thì các em hãy comment ở mục Hỏi đáp, Cộng đồng Vật lý DapAnHay sẽ hỗ trợ cho các em một cách nhanh chóng!
Chúc các em học tập tốt và luôn đạt thành tích cao trong học tập!
-- Mod Vật Lý 12 DapAnHay
Nêu cách biểu diễn một dao động điều hòa bằng một vecto quay.
Trình bày phương pháp giản đồ Fre-nen để tìm dao động tổng hợp của hai dao động điều hòa cùng phương, cùng tần số.
Nêu ảnh hưởng của độ lệch pha \({\varphi _2} - {\varphi _1}\)đến biên độ của dao động tổng hợp trong các trường hợp:
a) Hai dao động thành phần cùng pha
b) Hai dao động thành phần ngược nhau
c) Hai dao động thành phần có pha vuông góc
\({\varphi _2} - {\varphi _1} = \pm \frac{\pi }{2} + n\pi \)
Xét một vectơ quay  có những đặc điểm sau:
có những đặc điểm sau:
- Có độ lớn bằng hai dơn vị chiều dài.
- Quay quanh O với tốc độ góc 1 rad/s.
- Tại thời điểm t = 0, vectơ hợp với trục Ox một góc 300.
Hỏi vec tơ quay biểu diễn phương trình của dao động điều hòa nào?
A. \(x = 2cos(t -\frac{\pi}{3} )\).
B. \(x = 2cos(t +\frac{\pi }{6})\)
C. \(x = 2cos(t - 300)\).
D. \(x = 2cos(t + \frac{\pi }{3})\).
Chọn đáp án đúng.
Hai dao động là ngược chiều khi:
A. \(\varphi _2 - \varphi _1 = 2n \pi\).
B. \(\varphi _2 - \varphi _1 = n \pi\).
C. \(\varphi _2 - \varphi _1 = (n - 1) \pi\).
D. \(\varphi _2 - \varphi _1 = (2n - 1) \pi.\)
Cho hai dao động điều hòa cùng phương, cùng tần số góc \(\omega = 5\pi rad/s\), với các biên độ:
\(A_1 = \frac{\sqrt{3}}{2} cm, A_2 = \sqrt{3} cm\) và các pha ban đầu tương ứng \(\varphi _1=\frac{\pi }{2}\) và \(\varphi _2=\frac{5\pi }{6}.\)
Tìm phương trình dao động tổng hợp của hai dao động trên.
Dùng phương pháp giản đồ Fre-nen, có thể biểu diễn được dao động tổng hợp của hai dao động
A. cùng phương, cùng chu kì. B. cùng phương, khác chu kì.
C. khác phương, cùng chu kì. D. khác phương, khác chu kì.
Cho hai dao động điều hoà cùng phương, có phương trình lần lượt là x1 = A1cosωt và x2 = A2cos(ωt + π/2). Biên độ dao động tổng hợp của hai dao động này là
A. \(A = \sqrt {\left| {A_1^2 - A_2^2} \right|} \)
B. \(A = \sqrt {A_1^2 + A_2^2} \)
C. \(A = \sqrt {{A_1} - {A_2}} \)
D. \(A = {A_1} + {A_2}\)
Cho hai dao động điều hoà cùng phương có các phương trình lần lượt là x1 = 4cos(πt - π/6)(cm) và x2 = 4cos(πt - π/2)(cm). Dao động tổng hợp của hai dao động này có biên độ là
A. 8 cm. B. 2 cm. C. 4\(\sqrt 3\) cm. D. 4\(\sqrt 2 \) cm.
Hai dao động điều hoà cùng phương có phương trình li độ lần lượt là x1 = 5cos(100πt + π/2)(cm) và x2 = 12cos(100πt)(cm). Dao động tổng hợp của hai dao động này có biên độ bằng
A. 17 cm. B. 8,5 cm. C. 13 cm. D. 7 cm.
Hai dao động điều hoà cùng phương, cùng chu kì có phương trình lần lượt là : x1 = 4cos(4πt + π/2)(cm) và x2 = 3cos(4πt + π)(cm). Biên độ và pha ban đầu của dao động tổng hợp là
A. 5 cm ; 36,9o. B. 5 cm ; 0,7π rad.
C. 5 cm ; 0,2π rad. D. 5 cm ; 0,3π rad.
Hai dao động điều hoà cùng phương, cùng tần số có phương trình lần lượt là : x1 = 5cos(πt/2 + π/4)(cm) và x2 = 5cos(πt/2 + 3π/4)(cm). Biên độ và pha ban đầu của dao động tổng hợp là
A. 5 cm ; π/2 rad. B. 7,1 cm ; 0 rad.
C. 7,1 cm ; π/2 rad. D. 7,1 cm ; π/4 rad.
Hai dao động điều hoà cùng phương, cùng tần số có phương trình lần lượt là : x1 = 3cos(5πt/2 + π/6)(cm) và x2 = 3cos(5πt/2 + 3π/3)(cm). Biên độ và pha ban đầu của dao động tổng hợp là
A. 6 cm ; π/4 rad. B. 5,2 cm ; π/4 rad.
C. 5,2 cm ; π/3 rad. D. 5,8 cm ; π/4 rad.
Hai dao động điều hoà cùng phương, cùng chu kì có phương trình lần lượt là : \({x_1} = 4\cos \left( {10\pi t + \frac{\pi }{3}} \right)\left( {cm} \right){\mkern 1mu} ;{x_2} = 4\cos \left( {10\pi t + \pi } \right)\left( {cm} \right)\) .
Tìm phương trình của dao động tổng hợp.
Hai dao động điều hoà cùng phương, cùng chu kì có phương trình lần lượt \({x_1} = 6\sin \frac{{5\pi t}}{2}\left( {cm} \right){\mkern 1mu} ;{x_2} = 6\cos \frac{{5\pi t}}{2}\left( {cm} \right)\) .Tìm phương trình của dao động tổng hợp.
Hai dao động điều hoà cùng phương, cùng tần số, có phương trình lần lượt là : \({x_1} = 6\cos \left( {\omega t - \frac{\pi }{4}} \right)\left( {cm} \right){\mkern 1mu} = 6\cos \left( {\omega t - \frac{{5\pi }}{{12}}} \right)cm\) . Tìm phương trình của dao động tổng hợp.
Xét dao động tổng hợp của 2 dao động hợp thành có cùng tần số. Biên độ của dao động tổng hợp không phụ thuộc.
A. Biên độ dao động hợp thành thứ nhất
B. Biên độ của dao động hợp thành thứ hai
C. Tần số chung của hai pha hợp thành.
D. Độ lệch pha của hai dao động hợp thành.
Hai dao động cơ học điều hòa cùng phương, cùng tần số góc ω = 50rad/s, có biên độ lần lượt là 100mm và 173mm, dao động thứ hai trễ pha π/2 so với dao động thứ nhất. Xác định dao động tổng hợp.
Dùng công thức lượng giác (tổng của hai cosin) tìm tổng hợp của hai dao động điều hòa cùng phương, cùng tần số góc ω, cùng biên độ và có độ lệch pha Δφ. Đối chiếu với kết quả nhận được bằng cách dùng Phương pháp đơn giản đồ Fre – nen.
Tiêu đề câu hỏi
Nội dung câu hỏi
Câu trả lời của bạn
Câu trả lời của bạn
Khoảng thời gian ngắn nhất giữa hai lần liên tiếp động năng bằng ba lần thế năng là : \(\frac{T}{6} = 1s\)
Khoảng thời gian ngắn giữa hai lần liên tiếp thế năng bằng 3 lần động năng là : \(\frac{T}{6} = 1s\)
Câu trả lời của bạn
Phương trình tổng hợp của hai dao động là \(x = {x_1} + {x_2} = 3\cos \left( {\frac{{2\pi }}{3}t - \frac{\pi }{2}} \right) + 3\sqrt 3 \cos \frac{{2\pi }}{3}t = 6\cos \left( {\frac{{2\pi }}{3} - \frac{\pi }{6}} \right)cm\)
Tại các thời điểm x1 = x2 ta có \(3\cos \left( {\frac{{2\pi }}{3}t - \frac{\pi }{2}} \right) = 3\sqrt 3 \cos \frac{{2\pi }}{3}t = > \tan \left( {\frac{{2\pi }}{3}t} \right) = \frac{1}{{\sqrt 3 }} = > \frac{{2\pi }}{3}t = \frac{\pi }{6} = > t = \frac{1}{4} + \frac{{3k}}{2}\)
Thay t vào phương trình tổng hợp ta có \(x = 6\cos \left( {\frac{{2\pi }}{3}t - \frac{\pi }{6}} \right) = 6\cos \left( {\frac{{2\pi }}{3}\left( {\frac{1}{4} + \frac{{3k}}{2}} \right) - \frac{\pi }{6}} \right) = 6\cos k\pi = \pm 6\)
Câu trả lời của bạn
Tần số góc của con lắc là:
\(\omega = \sqrt {\frac{k}{m}} \Rightarrow k = m{\omega ^2} = 0,1.{\left( {5\pi } \right)^2} = 25\,\,\left( {N/m} \right)\)
Độ biến dạng của lò xo ở VTCB là:
\(\Delta l = \frac{{mg}}{k} = \frac{{0,1.10}}{{25}} = 0,04\,\,\left( m \right)\)
Trong 1 chu kì, tỉ số giữa thời gian giãn và thời gian lò xo nén bằng \(2\), ta có:
\(\frac{{{t_{gian}}}}{{{t_{nen}}}} = 2 \Rightarrow {t_{nen}} = \frac{1}{2}{t_{gian}} = \frac{1}{3}T\)
\( \to \) trong 1 chu kì, góc quét dược của vecto quay khi lò xo bị nén là:
\(\Delta \varphi = \omega \Delta t = \frac{{2\pi }}{T}.\frac{T}{3} = \frac{{2\pi }}{3}\,\,\left( {rad} \right)\)
Từ VTLG, ta thấy \(\alpha = \frac{\pi }{3}\,\,rad\)
\(\begin{array}{l}
\Rightarrow \frac{{\Delta l}}{A} = \cos \alpha \Rightarrow \frac{4}{A} = \cos \frac{\pi }{3} = \frac{1}{2}\\
\Rightarrow A = 8\,\,\left( {cm} \right) = 0,08\,\,\left( m \right)
\end{array}\)
Độ lớn lực đàn hồi cực đại là:
\({F_{dh\max }} = k\left( {A + \Delta l} \right) = 25.\left( {0,08 + 0,04} \right) = 3\,\,\left( N \right)\)
Câu trả lời của bạn
Ta có : \(\left\{ \begin{array}{l}4x = \frac{{2\pi x}}{\lambda } \Rightarrow \lambda = \frac{\pi }{2}\left( m \right)\\\omega = 1rad/s \Rightarrow T = 2\pi \left( s \right)\end{array} \right. \Rightarrow v = \frac{\lambda }{T} = \frac{1}{4}m/s = 25cm/s\)
Câu trả lời của bạn
Sử dụng đường tròn lượng giác xác định được thời điểm chất điểm có tốc độ 5π (cm/s) lần thứ 2019 kể từ lúc t = 0 là : t = 504.T + 0,5 = 1008,5s
Câu trả lời của bạn
Chu kỳ vệ tinh bằng chu kỳ trái đất bằng 24h
Tốc độ góc của vệ tinh là \({{\omega }_{vt}}=\frac{2\pi }{24.3600}\left( rad/s \right)=>{{v}_{vt}}={{\omega }_{vt}}.{{R}_{vt}}=>{{R}_{vt}}=\frac{3,07}{\frac{2\pi }{24.3600}}=42215\left( km \right)\)
Sóng truyền từ vệ tinh xuống trái đất theo dạng hình chóp khi đó hình ảnh sóng vệ tinh truyền xuống trái đất được biểu diễn.
Vị trí xa nhất sóng vệ tinh có thể truyền tới trái đất là \({{S}_{max}}=\sqrt{R_{_{vt}}^{2}-R_{_{td}}^{2}}=\sqrt{{{42215}^{2}}-{{6378}^{2}}}=41730km\)
Sóng truyền từ A đến B hết \(\Delta t=\frac{{{S}_{max}}}{c}=0,142s\)
Câu trả lời của bạn
Tại thời điểm x1 = x2, ta có:
\(\begin{array}{*{20}{l}}
\begin{gathered}
{x_1} = {x_2} \Rightarrow 3\cos \left( {\frac{{2\pi }}{3}t - \frac{\pi }{2}} \right) = 3\sqrt 3 \cos \left( {\frac{{2\pi }}{3}t} \right) \hfill \\
\Rightarrow 3\sin \left( {\frac{{2\pi }}{3}t} \right) - 3\sqrt 3 \cos \left( {\frac{{2\pi }}{3}t} \right) = 0 \hfill \\
\end{gathered} \\
\begin{gathered}
\Rightarrow \frac{1}{2}\sin \left( {\frac{{2\pi }}{3}t} \right) - \frac{{\sqrt 3 }}{2}\cos \left( {\frac{{2\pi }}{3}t} \right) = 0 \hfill \\
\Rightarrow \cos \frac{\pi }{3}\sin \left( {\frac{{2\pi }}{3}t} \right) - \sin \frac{\pi }{3}\cos \left( {\frac{{2\pi }}{3}t} \right) = 0 \hfill \\
\end{gathered} \\
\begin{gathered}
\Rightarrow \sin \left( {\frac{{2\pi }}{3}t - \frac{\pi }{3}} \right) = 0 \Rightarrow \frac{{2\pi }}{3}t - \frac{\pi }{3} = k\pi \hfill \\
\Rightarrow t = \frac{3}{2}k + \frac{1}{2} \hfill \\
\end{gathered}
\end{array}\)
Với k = 0, ta có:
\(\left\{ \begin{array}{l}{x_1} = \dfrac{{3\sqrt 3 }}{2}\,\,cm\\{x_2} = \dfrac{{3\sqrt 3 }}{2}\,\,cm\end{array} \right. \Rightarrow x = {x_1} + {x_2} = \dfrac{{3\sqrt 3 }}{2} + \dfrac{{3\sqrt 3 }}{2} = 3\sqrt 3 \,\,\left( {cm} \right)\)
Với k = 1, ta có:
\(\left\{ \begin{array}{l}{x_1} = - \dfrac{{3\sqrt 3 }}{2}\,\,cm\\{x_2} = - \dfrac{{3\sqrt 3 }}{2}\,\,cm\end{array} \right. \Rightarrow x = {x_1} + {x_2} = - \dfrac{{3\sqrt 3 }}{2} + \left( { - \dfrac{{3\sqrt 3 }}{2}} \right) = - 3\sqrt 3 \,\,\left( {cm} \right)\)
Câu trả lời của bạn
Tần số góc của hai con lắc là:
\(\begin{array}{l}{\omega _1} = \sqrt {\dfrac{g}{{{{\rm{l}}_1}}}} = \sqrt {\dfrac{{10}}{{1,44}}} = \dfrac{{10\sqrt {10} }}{{12}} = \dfrac{{5\pi }}{6}\,\,\left( {rad/s} \right)\\{\omega _2} = \sqrt {\dfrac{g}{{{{\rm{l}}_2}}}} = \sqrt {\dfrac{{10}}{1}} = \sqrt {10} = \pi \,\,\left( {rad/s} \right)\end{array}\)
Giả sử thời điểm ban đầu hai con lắc đi qua vị trí cân bằng theo chiều âm.
Phương trình dao động của hai con lắc là:
\(\begin{array}{l}{\alpha _1} = {\alpha _0}\cos \left( {\dfrac{{5\pi }}{6}t + \dfrac{\pi }{2}} \right)\,\,\left( {rad} \right)\\{\alpha _2} = {\alpha _0}\cos \left( {\pi t + \dfrac{\pi }{2}} \right)\,\,\left( {rad} \right)\end{array}\)
Nhận xét: hai dây treo song song với nhau khi hai con lắc có cùng li độ góc.
\( \Rightarrow {\alpha _1} = {\alpha _2} \Rightarrow \cos \left( {\dfrac{{5\pi }}{6}t + \dfrac{\pi }{2}} \right) = \cos \left( {\pi t + \dfrac{\pi }{2}} \right)\)
Sử dụng máy tính bỏ túi để tìm t.
+ Bấm MODE – 2 để máy tính hiện CMPLX.
+ Bấm SHIFT – MODE – \( \downarrow \) – 3 – 1 → Hiển thị dạng a + bi
+ Nhập \(\dfrac{{5\pi }}{6} + \dfrac{\pi }{2}i - SHIFT - RCL - A\)
+ Nhập \(\pi + \dfrac{\pi }{2}i - SHIFT - RCL - B\)
+ Bấm SHIFT – 2 – 2, nhập \(CONJG\left( {A - B} \right) = - \dfrac{\pi }{6}\)
\( \Rightarrow \alpha + \beta i = - \dfrac{\pi }{6} + 0i \Rightarrow t = 0 + \dfrac{{k2\pi }}{\alpha } = \dfrac{{k2\pi }}{{ - \dfrac{\pi }{6}}} = - 12k\,\,\left( {loai} \right)\)
+ Nhập \(CONJG\left( {A + B} \right) = \dfrac{{11\pi }}{6} - \pi i\)
\(\begin{gathered}
\Rightarrow \alpha ' + \beta 'i = \frac{{11\pi }}{6} - \pi i \hfill \\
\Rightarrow t = \frac{{\beta '}}{{\alpha '}} + \frac{{m2\pi }}{{\alpha '}} = \frac{{ - \pi }}{{\frac{{11\pi }}{6}}} + \frac{{m2\pi }}{{\frac{{11\pi }}{6}}} = - \frac{6}{{11}} + \frac{{12m}}{{11}} \hfill \\
\end{gathered} \)
Lần gặp đầu tiên (m = 1) \( \Rightarrow t = - \dfrac{6}{{11}} + \dfrac{{12}}{{11}} = \dfrac{6}{{11}} \approx 0,54\,\,\left( s \right)\)
Câu trả lời của bạn
Gọi \(\Delta \varphi \) là độ lệch pha giữa hai con lắc.
Khoảng cách lớn nhất giữa hai con lắc là:
\(\begin{array}{l}{A_{\max }}^2 = {A_1}^2 + {A_2}^2 + 2{A_1}{A_2}\cos \left( {\Delta \varphi + \pi } \right)\\ \Rightarrow {6^2} = {6^2} + {\left( {6\sqrt 3 } \right)^2} + 2.6.6\sqrt 3 \cos \left( {\Delta \varphi + \pi } \right)\\ \Rightarrow \cos \left( {\Delta \varphi + \pi } \right) = \dfrac{{\sqrt 3 }}{2} \Rightarrow \Delta \varphi = - \dfrac{\pi }{6}\,\,\left( {rad} \right)\end{array}\)
Thế năng con lắc thứ nhất đạt cực đại khi nó ở vị trí biên, khi đó con lắc thứ hai có li độ:
\({x_2} = \pm \dfrac{{\sqrt 3 {A_2}}}{2}\)
Thế năng cực đại của con lắc thứ nhất là:
\({W_{t1\max }} = W = \dfrac{1}{2}k{A_1}^2\)
Động năng của con lắc thứ hai khi đó là:
\(\begin{array}{*{20}{l}}
\begin{gathered}
{W_{d2}} = {W_2} - {W_{t2}} = \frac{1}{2}k{A_2}^2 - \frac{1}{2}k{x_2}^2 \hfill \\
\Rightarrow {W_{d2}} = \frac{1}{2}k{A_2}^2 - \frac{1}{2}k{\left( { \pm \frac{{\sqrt 3 {A_2}}}{2}} \right)^2} = \frac{1}{4}.\frac{1}{2}k{A_2}^2 \hfill \\
\end{gathered} \\
\begin{gathered}
\Rightarrow \frac{{{W_{d2}}}}{W} = \frac{{\frac{1}{4}.\frac{1}{2}k{A_2}^2}}{{\frac{1}{2}k{A_1}^2}} = \frac{1}{4}\frac{{{A_2}^2}}{{{A_1}^2}} = \frac{1}{4}\frac{{{{\left( {6\sqrt 3 } \right)}^2}}}{{{6^2}}} = \frac{3}{4} \hfill \\
\Rightarrow {W_{d2}} = \frac{{3W}}{4} \hfill \\
\end{gathered}
\end{array}\)
Câu trả lời của bạn
Tần số góc của dao động là: \(\omega = \sqrt {\dfrac{k}{m}} = \sqrt {\dfrac{{100}}{{0,1}}} = 10\pi \,\,\left( {rad/s} \right)\)
Chú ý: Kéo vật nhỏ lệch khỏi vị trí cân bằng đoạn x rồi thả nhẹ, đoạn kéo ra chính là biên độ.
Phương trình dao động của hai con lắc là:
\(\left\{ \begin{array}{l}{x_1} = 8\cos \left( {10\pi t} \right)\,\,\left( {cm} \right)\\{x_2} = 6\cos \left( {10\pi t - 10\pi .\dfrac{1}{{15}}} \right) \Rightarrow {x_2} = 6\cos \left( {2\pi t - \dfrac{{2\pi }}{3}} \right)\,\,\left( {cm} \right)\end{array} \right.\)
Khoảng cách giữa hai vật là:
\(\Delta x = \left| {{x_1} - {x_2}} \right| = \left| {8\angle 0 - 6\angle \dfrac{{ - 2\pi }}{3}} \right| = 2\sqrt {37} \angle 0,44\)
Phương trình dao động tổng hợp của hai dao động:
\(x = 2\sqrt {37} \cos \left( {2\pi t + 0,44} \right)\,\,\left( {cm} \right) \Rightarrow \Delta {x_{\max }} = {x_{\max }} = 2\sqrt {37} \,\,\left( {cm} \right)\)
\({d_{\max }} = \sqrt {\Delta {x_{\max }}^2 + {O_1}{O_2}^2} = \sqrt {{{\left( {2\sqrt {37} } \right)}^2} + {{10}^2}} = 2\sqrt {62} \,\,\left( {cm} \right) \approx 15,7\,\,\left( {cm} \right)\)
Câu trả lời của bạn
Khoảng cách giữa hai chất điểm:
\(x = \left| {{x_1} - {x_2}} \right| = \left| {6\cos \left( {\dfrac{6}{5}\pi t + \dfrac{\pi }{2}} \right) - 6\sqrt 3 \cos \left( {\dfrac{6}{5}\pi t + \dfrac{\pi }{3}} \right)} \right|\)
Sử dụng máy tính bỏ túi:
+ Bấm MODE – 2 để máy tính hiện lên chữ CMPLX
+ Bấm SHIFT – MODE – 4 để đưa máy về chế độ rad
+ Bấm \(6\angle \dfrac{\pi }{2} - 6\sqrt 3 \angle \dfrac{\pi }{3}SHIFT - 2 - 3 - = 6\angle - \dfrac{{5\pi }}{6}\)
\( \Rightarrow x = 6\cos \left( {\dfrac{6}{5}\pi t - \dfrac{{5\pi }}{6}} \right)\,\,\left( {cm} \right)\)
Khoảng cách lớn nhất giữa hai chất điểm là:
\(\begin{array}{l}{x_{\max }} = 6 \Leftrightarrow \left| {6\cos \left( {\dfrac{6}{5}\pi t - \dfrac{{5\pi }}{6}} \right)} \right| = 6 \Rightarrow \cos \left( {\dfrac{6}{5}\pi t - \dfrac{{5\pi }}{6}} \right) = \pm 1\\ \Rightarrow \dfrac{6}{5}\pi t - \dfrac{{5\pi }}{6} = k\pi \Rightarrow t = \dfrac{5}{6}k + \dfrac{{25}}{{36}}\,\,\left( s \right)\end{array}\)
Thời điểm đầu tiên \( \to k = 0 \Rightarrow t = \dfrac{{25}}{{36}}\,\,\left( s \right)\)
A \(\dfrac{\pi }{3}\,\,rad\)
B \(\dfrac{{2\pi }}{3}\,\,rad\)
C \(\dfrac{\pi }{6}\,\,rad\)
D \(\dfrac{\pi }{4}\,\,rad\)
Câu trả lời của bạn
Tốc độ cực đại của vật là:
\({v_{\max }} = 2\pi fA \Rightarrow 80\pi \sqrt 7 = 2\pi .10.A \Rightarrow A = 4\sqrt 7 \,\,\left( {cm} \right)\)
Biên độ dao động tổng hợp là:
\(\begin{array}{*{20}{l}}
\begin{gathered}
{A^2} = {A_1}^2 + {A_2}^2 + 2{A_1}{A_2}\cos \Delta \varphi \hfill \\
\Rightarrow {\left( {4\sqrt 7 } \right)^2} = {4^2} + {\left( {4\sqrt 3 } \right)^2} + 2.4.4\sqrt 3 .cos\Delta \varphi \hfill \\
\end{gathered} \\
{ \Rightarrow \cos \Delta \varphi = \frac{{\sqrt 3 }}{2} \Rightarrow \Delta \varphi = \frac{\pi }{6}{\mkern 1mu} {\mkern 1mu} \left( {rad} \right)}
\end{array}\)
Chọn C.
Câu trả lời của bạn
Ở thời điểm li độ của dao động thành phần thứ nhất và dao động tổng hợp lần lượt là 2 cm và – 3 cm, li độ của dao động thành phần thứ hai là:
\({x_2} = x - {x_1} = - 3 - 2 = - 5\,\,\left( {cm} \right) \Rightarrow {x_2} = - 2,5{x_1} \Rightarrow {x_1} = - 0,4{x_2}\)
Ở thời điểm li độ dao động tổng hợp là 4,5 cm, ta có:
\({x_1} + {x_2} = 4,5 \Rightarrow - 0,4{x_2} + {x_2} = 4,5 \Rightarrow {x_2} = 7,5\,\,\left( {cm} \right)\)
Chọn C.
Câu trả lời của bạn
Từ giản đồ vecto, áp dụng định lí hàm sin, ta có:
\(\dfrac{A}{{\sin \dfrac{\pi }{3}}} = \dfrac{{{A_2}}}{{\sin \left( {\varphi + \dfrac{\pi }{6}} \right)}} \Rightarrow A = \dfrac{{{A_2}\sqrt 3 }}{{2\sin \left( {\varphi + \dfrac{\pi }{6}} \right)}}\)
Để \({A_{\min }} \Leftrightarrow {\left[ {\sin \left( {\varphi + \dfrac{\pi }{6}} \right)} \right]_{\max }} = 1 \Leftrightarrow \varphi + \dfrac{\pi }{6} = \dfrac{\pi }{2} \Rightarrow \varphi = \dfrac{\pi }{3}\,\,\left( {rad} \right)\)
Vậy dao động tổng hợp có pha ban đầu là \( - \dfrac{\pi }{3}\,\,rad\)
Câu trả lời của bạn
Sử dụng máy tính bỏ túi:
+ Bấm MODE – 2 để máy tính hiện lên chữ CMPLX
+ Bấm SHIFT – MODE – 4 để đưa máy về chế độ rad
+ Bấm \(3\angle - \dfrac{{5\pi }}{6} - 5\angle \dfrac{\pi }{6}SHIFT - 2 - 3 - = 8\angle - \dfrac{{5\pi }}{6} \Rightarrow \left\{ \begin{array}{l}{A_2} = 8\,\,\left( {cm} \right)\\{\varphi _2} = - \dfrac{{5\pi }}{6}\,\,\left( {rad} \right)\end{array} \right.\)
\( \Rightarrow {x_2} = 8\cos \left( {\pi t - \frac{{5\pi }}{6}} \right){\mkern 1mu} {\mkern 1mu} cm\)
A 24 cm
B 30 cm
C 28 cm
D 22 cm
Câu trả lời của bạn
Biên độ dao động tổng hợp khi hai dao động thành phần vuông pha và ngược pha là:
\(\begin{array}{l}\left\{ \begin{array}{l}{A_ \bot }^2 = {A_1}^2 + {A_2}^2 + 2{A_1}{A_2}\cos \dfrac{\pi }{2}\\{A_{nguoc}}^2 = {A_1}^2 + {A_2}^2 + 2{A_1}{A_2}\cos \pi \end{array} \right.\\ \Rightarrow \left\{ \begin{array}{l}{20^2} = {A_1}^2 + {A_2}^2\\15,{6^2} = {A_1}^2 + {A_2}^2 - 2{A_1}{A_2}\end{array} \right. \Rightarrow \left\{ \begin{array}{l}{A_1} = 19,6\,\,\left( {cm} \right)\\{A_2} = 4\,\,\left( {cm} \right)\end{array} \right.\end{array}\)
Biên độ dao động tổng hợp khi hai dao động cùng pha là:
\({A_{cung}} = {A_1} + {A_2} = 19,6 + 4 = 23,6\,\,\left( {cm} \right)\)
Chọn A.
A 200 cm/s2
B 100 cm/s2
C 50 cm/s2
D 150 cm/s2
Câu trả lời của bạn
Sử dụng máy tính bỏ túi:
+ Bấm MODE – 2 để máy tính hiện lên chữ CMPLX
+ Bấm SHIFT – MODE – 4 để đưa máy về chế độ rad
+ Bấm \(5\angle - \dfrac{\pi }{4} + 7\angle \dfrac{\pi }{2}SHIFT - 2 - 3 - = 4,95\angle 0,7 \Rightarrow A = 4,95\,\,\left( {cm} \right)\)
Tốc độ của chất điểm khi qua vị trí cân bằng là:
\({a_{\max }} = {\omega ^2}A = {\left( {2\pi } \right)^2}.4,95 = 195,4\,\,\left( {cm/{s^2}} \right) \approx 200\,\,\left( {cm/{s^2}} \right)\)
Câu trả lời của bạn
Ta có li độ của các dao động thành phần tại thời điểm t1 và t2 là:
\(\left\{ \begin{array}{l}{x_{11}}^2 + {x_{12}}^2 = {A_1}^2\\{x_{21}}^2 + {x_{22}}^2 = {A_2}^2\\{x_{31}}^2 + {x_{32}}^2 = {A_2}^2\end{array} \right. \Rightarrow \left\{ \begin{array}{l}{\left( { - 20} \right)^2} + {\left( { - 20\sqrt 3 } \right)^2} = {A_1}^2\\{80^2} + {0^2} = {A_2}^2\\{40^2} + {\left( {40\sqrt 3 } \right)^2} = {A_3}^2\end{array} \right. \Rightarrow \left\{ \begin{array}{l}{A_1} = 40\,\,\left( {cm} \right)\\{A_2} = 80\,\,\left( {cm} \right)\\{A_3} = 80\,\,\left( {cm} \right)\end{array} \right.\)
Sử dụng máy tính bỏ túi:
+ Bấm MODE – 2 để máy tính hiện lên chữ CMPLX
+ Bấm SHIFT – MODE – 4 để đưa máy về chế độ rad
+ Bấm \(40\angle \frac{{2\pi }}{3} + 80\angle 0 + 80\angle - \frac{{2\pi }}{3}SHIFT - 2 - 3 - = 40\angle - \frac{\pi }{3}\)
\( \Rightarrow \left\{ {\begin{array}{*{20}{l}}
{A = 40\,\,\left( {cm} \right)} \\
{\varphi = - \frac{\pi }{3}\,\,\left( {rad} \right)}
\end{array}} \right.\)
Vậy phương trình dao động tổng hợp là: \(x = 40\cos \left( {20\pi t - \dfrac{\pi }{3}} \right)\,\,cm\)
Câu trả lời của bạn
Ta có li độ của các dao động thành phần tại thời điểm t1 và t2 là:
\(\left\{ \begin{array}{l}{x_{11}}^2 + {x_{12}}^2 = {A_1}^2\\{x_{21}}^2 + {x_{22}}^2 = {A_2}^2\\{x_{31}}^2 + {x_{32}}^2 = {A_2}^2\end{array} \right. \Rightarrow \left\{ \begin{array}{l}{\left( { - 10} \right)^2} + {\left( { - 10\sqrt 3 } \right)^2} = {A_1}^2\\{40^2} + {0^2} = {A_2}^2\\{\left( { - 20} \right)^2} + {\left( {20\sqrt 3 } \right)^2} = {A_3}^2\end{array} \right. \Rightarrow \left\{ \begin{array}{l}{A_1} = 20\,\,\left( {cm} \right)\\{A_2} = 40\,\,\left( {cm} \right)\\{A_3} = 40\,\,\left( {cm} \right)\end{array} \right.\)
Sử dụng máy tính bỏ túi:
+ Bấm MODE – 2 để máy tính hiện lên chữ CMPLX
+ Bấm SHIFT – MODE – 4 để đưa máy về chế độ rad
+ Bấm \(20\angle \frac{{2\pi }}{3} + 40\angle 0 + 40\angle - \frac{{2\pi }}{3}SHIFT - 2 - 3 - = 20\angle - \frac{\pi }{3}\)
\( \Rightarrow A = 20\,\,\left( {cm} \right)\)












0 Bình luận
Để lại bình luận
Địa chỉ email của hạn sẽ không được công bố. Các trường bắt buộc được đánh dấu *